Quadro per la valutazione e la stadiazione…


Quadro per la valutazione e la stadiazione…

Un paziente di 71 anni, in buono…

La malattia coronavirus 2019, nota anche come…
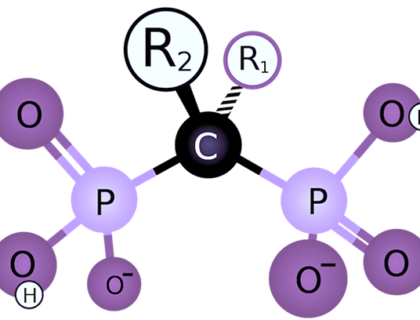
Articolo aggiornato il 27/09/2018 I bifosfonati,…

La parodontite è una malattia complessa che…

Premessa La fotografia in odontoiatria è un…